Sebuah
robot yang dapat bergerak mengikuti sebuah garis berwarna hitam, Robot ini
lazim disebut robot line tracker atau
line follower. Bagaimana bisa robot
ini mengikuti garis hitam? Tentulah diperlukan sebuah sensor, yaitu sensor
cahaya.
Seperti layaknya manusia, bagaimana manusia dapat
berjalan mengikuti jalan yang ada tanpa menabrak dan sebagainya, tentunya
karena manusia memiliki “mata” sebagai penginderanya. Begitu juga robot line
follower ini, dia memiliki sensor garis yang berfungsi seperti “mata” pada
manusia. Sensor garis ini mendeteksi adanya garis atau tidak pada permukaan
lintasan robot tersebut, dan informasi yang diterima sensor garis kemudian
diteruskan ke prosesor untuk diolah sedemikian rupa dan akhirnya hasil
informasi hasil olahannya akan diteruskan ke penggerak atau motor agar motor
dapat menyesuaikan gerak tubuh robot sesuai garis yang dideteksinya.
Posisi Sensor di Atas Garis Hitam
Pada konstruksi yang sederhana, robot line follower memiliki dua sensor garis,
yang terhubung ke dua motor (kanan dan kiri) secara bersilang melalui sebuah saklar
transistor. Sensor garis A (Kiri) mengendalikan motor kanan, sedangkan sensor
garis B (kanan) mengendalikan motor kiri.
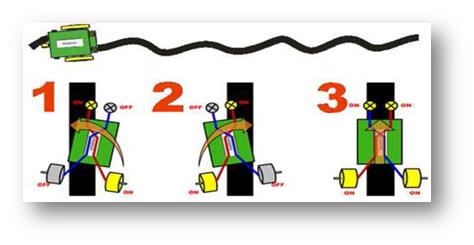
Gambar
1.
Prinsip kerja robot line followerdengan sensor di atas garis hitam
1.Ketika
sensor A mendeteksi garis sedangkan sensor B keluar garis ini berarti posisi
robot berada lebih sebelah kanan dari garis, untuk itu motor kanan akan aktif
sedangkan motor kiri akan mati. Akibatnya motor akan berbelok kearah kiri.
2.Begitu
sebaliknya ketika sensor B mendeteksi garis, motor kiri aktif dan motor kanan
mati, maka robot akan berbelok ke kanan.
3.Jika
kedua sensor mendeteksi garis maka kedua motor akan aktif dan robot akan
bergerak maju.
Gambar 2. Desain proteus robot line follower analog dengan sensor LDR di
atas garis hitam
Gambar 3. Desain actual robot line follower analog dengan sensor LDR di
atas garis hitam
Posisi Sensor di Atas Permukaan Putih
Jika pada
skema Gambar 2, posisi sensor di set di atas garis hitam, maka pada gambar
berikut akan di tunjukkan skema untuk posisi sensor yang di set di atas
permukaan putih.
Gambar 4. Ilustrasi robot line
follower dengan posisi sensor di atas permukaan putih
Gambar 5. Desain proteus robot line follower analog dengan sensor LDR di
atas permukaan putih
Gambar 6. Desain aktual robot line follower analog dengan sensor LDR di
atas permukaan putih
Kelelawar hewan nocturnal, yang berkeliaran di malam
hari...meski berada dikegelapan, kelelawar dapat terbang bebas tanpa menabrak
penghalang didepannya,, kelelawar dapat menghindari penghalang didepannya
karena kelelawar dapat mengeluarkan gelombang ultrasonic, yang jika ada
penghalang maka gelombang tersebut akan dipantulkan kembali dan diterima oleh
telinga kelelawar yang lebar, sehingga kelelawar dapat menghindar secara
spontan ketika didepannya ada penghalang.
Gambar 1. Prinsip kerja pengukuran
jarak benda
Karakteristik
Sensor Ultrasonic PING Paralax
Ultrasonik, sebutan untuk jenis suara diatas batas
suara yang bisa didengar manusia. Seperti diketahui, telinga manusia hanya bisa
mendengar suara dengan frekuensi 20 Hz sampai 20KHz. Lebih dari itu hanya
beberapa jenis binatang yang mampu mendengarnya, seperti kelelawar dan lumba-lumba.
Lumba-lumba bahkan memanfaatkan ultrasonik untuk mengindera benda-benda di laut.
Dengan cara mengirimkan sebuah suara dan mengitung lamanya pantulan suara
tersebut maka dapat diketahui jarak kapal selam dengan benda tersebut.
Mula-mula suara dibunyikan, kemudian dihitung lama waktu sampai terdengar suara
pantulan. Jarak dapat dihitung dengan mengalikan kecepatan suara dengan waktu pantulan.
Kemudian hasilnya dibagi 2. Misalnya lama waktu pantulan adalah 1 detik, maka jaraknya
adalah (344,424m/detik x 1 detik)/2 = 172m.
Ping))) Ultrasonic Range Finder, adalah modul
pengukur jarak dengan ultrasonic buatan Paralax Inc. yang didesain khusus untuk
teknologi robotika. Dengan ukurannya yang cukup kecil (2,1cm x 4,5cm), sensor
seharga 350 ribu rupiah ini dapat mengukur jarak antara 3 cm sampai 300 cm. Keluaran
dari Ping))) berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya
bervariasi dari 115 uS sampai 18,5 mS.
Gambar 2. Sensor ultrasonic PING)))
Paralax
Pada dasanya, Ping))) terdiri dari sebuah chip
pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon
ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara
mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya. Pada modul Ping)))
terdapat 3 pin yang digunakan untuk jalur power supply (+5V), ground dan
signal. Pin signal dapat langsung dihubungkan dengan mikrokontroler tanpa
tambahan komponen apapun.
Ping))) mendeteksi objek dengan cara mengirimkan
suara ultrasonik dan kemudian “mendengarkan” pantulan suara tersebut. Ping)))
hanya akan mengirimkan suara ultrasonik ketika ada pulsa trigger dari
mikrokontroler (Pulsa high selama 5uS). Suara ultrasonik dengan frekuensi sebesar
40KHz akan dipancarkan selama 200uS. Suara ini akan merambat di udara dengan
kecepatan 344.424m/detik (atau 1cm setiap 29.034uS), mengenai objek untuk
kemudian terpantul kembali ke Ping))). Selama menunggu pantulan, Ping))) akan
menghasilkan sebuah pulsa. Pulsa ini akan berhenti (low) ketika suara pantulan
terdeteksi oleh Ping))). Oleh karena itulah lebar pulsa tersebut dapat
merepresentasikan jarak antara Ping))) dengan objek.
Berdasarkan
Datasheet
Jarak = (Lebar Pulsa/29.034uS)/2 (dalam
cm)
Jarak = (Lebar Pulsa x 0.034442)/2 (dalam
cm)
Karena
1/29.034 = 0.34442
Berdasarkan Perhitungan Kalibrasi Bolabot Institute
Jarak = Lebar Pulsa * 0.020+0.252(dalam
cm)
Nilai tersebut berbeda dengan nilai datasheet, sehingga penulis menyarankan untuk melakukan kalibrasi ulang jika akan menggunakan sensor ultrasonik PING))) agar lebih teliti.













 orcid.org/0000-0003-1963-193X
orcid.org/0000-0003-1963-193X






