Sebuah
robot yang dapat bergerak mengikuti sebuah garis berwarna hitam, Robot ini
lazim disebut robot line tracker atau
line follower. Bagaimana bisa robot
ini mengikuti garis hitam? Tentulah diperlukan sebuah sensor, yaitu sensor
cahaya.
Seperti layaknya manusia, bagaimana manusia dapat
berjalan mengikuti jalan yang ada tanpa menabrak dan sebagainya, tentunya
karena manusia memiliki “mata” sebagai penginderanya. Begitu juga robot line
follower ini, dia memiliki sensor garis yang berfungsi seperti “mata” pada
manusia. Sensor garis ini mendeteksi adanya garis atau tidak pada permukaan
lintasan robot tersebut, dan informasi yang diterima sensor garis kemudian
diteruskan ke prosesor untuk diolah sedemikian rupa dan akhirnya hasil
informasi hasil olahannya akan diteruskan ke penggerak atau motor agar motor
dapat menyesuaikan gerak tubuh robot sesuai garis yang dideteksinya.
Posisi Sensor di Atas Garis Hitam
Pada konstruksi yang sederhana, robot line follower memiliki dua sensor garis,
yang terhubung ke dua motor (kanan dan kiri) secara bersilang melalui sebuah saklar
transistor. Sensor garis A (Kiri) mengendalikan motor kanan, sedangkan sensor
garis B (kanan) mengendalikan motor kiri.
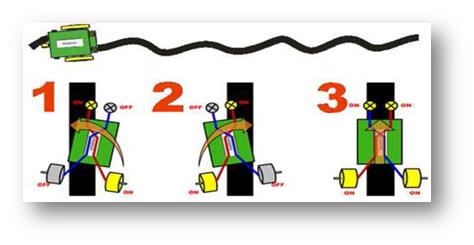
Gambar
1.
Prinsip kerja robot line follower dengan sensor di atas garis hitam
1. Ketika
sensor A mendeteksi garis sedangkan sensor B keluar garis ini berarti posisi
robot berada lebih sebelah kanan dari garis, untuk itu motor kanan akan aktif
sedangkan motor kiri akan mati. Akibatnya motor akan berbelok kearah kiri.
2. Begitu
sebaliknya ketika sensor B mendeteksi garis, motor kiri aktif dan motor kanan
mati, maka robot akan berbelok ke kanan.
3. Jika
kedua sensor mendeteksi garis maka kedua motor akan aktif dan robot akan
bergerak maju.
Gambar 2. Desain proteus robot line follower analog dengan sensor LDR di
atas garis hitam
Gambar 3. Desain actual robot line follower analog dengan sensor LDR di
atas garis hitam
Posisi Sensor di Atas Permukaan Putih
Jika pada
skema Gambar 2, posisi sensor di set di atas garis hitam, maka pada gambar
berikut akan di tunjukkan skema untuk posisi sensor yang di set di atas
permukaan putih.
Gambar 4. Ilustrasi robot line
follower dengan posisi sensor di atas permukaan putih
Gambar 5. Desain proteus robot line follower analog dengan sensor LDR di
atas permukaan putih
Gambar 6. Desain aktual robot line follower analog dengan sensor LDR di
atas permukaan putih
Copyright 2012@ Profesor Bolabot
"Bekerja Untuk Kebangkitan Teknologi Indonesia"
















 orcid.org/0000-0003-1963-193X
orcid.org/0000-0003-1963-193X






